SISO MFA Controller
A single-loop MFA control system includes a single-input-single-output
(SISO) process, a SISO MFA controller, and a feedback
loop.
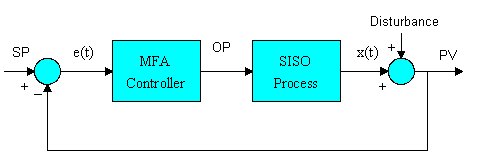
Single-loop MFA control system
The control objective is for the controller to produce
an output u(t) to force the process variable y(t) to
track the given trajectory of its setpoint r(t) under
variations of setpoint, disturbances, and process dynamics.
In other words, the task of the MFA controller is to
minimize the error e(t) in an online fashion, where
e(t) is the difference between the setpoint r(t) and
the process variable y(t). The minimization of error
e(t) is achieved by (i) the regulatory control capability
of the MFA controller, and (ii) the adjustment of the
MFA controller weighting factors that allow the controller
to deal with process dynamic changes, disturbances,
and other uncertainties.
MFA Controller Architecture
This graph illustrates the core architec¬ture of
a SISO MFA controller. Used as a key component, a multilayer
perceptron neural network consists of one input layer,
one hidden layer with N neurons, and one output layer
with one neuron.
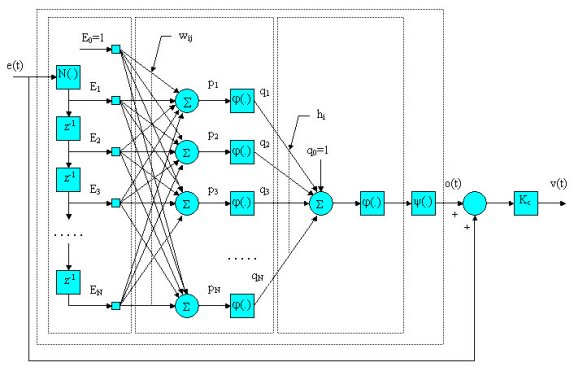
Architecture of a SISO MFA controller
Within the neural network there is a group of weighting
factors (wij and hi) that can be updated as needed to
vary the behavior of the controller. The algorithm for
updating the weighting factors is based on the goal
of minimizing the error between the setpoint and process
variable. Since this effort is the same as the control
objective, the adaptation of the weighting factors can
assist the controller in minimizing the error while
process dynamics are changing. In addition, the artificial
neural network based MFA controller "remembers"
a portion of the process data providing valuable information
for the process dynamics. In comparison, a digital version
of the PID controller remembers only the current and
previous two samples. In this regard, PID has almost
no memory and MFA possesses the memory that is essential
to a "smart" controller.
A Comparison of MFA and PID
Most industrial processes are still being controlled
by PID (proportional-integral-derivative) controllers.
PID is a simple general-purpose automatic controller
that is useful for controlling simple processes. However,
PID has major problems in controlling complex systems
and it also requires frequent manual tuning of its parameters
when the process dynamics change. The performance of
MFA (top) and PID (bottom) controllers is compared in
the following graph to show how MFA adapts when process
dynamics change.
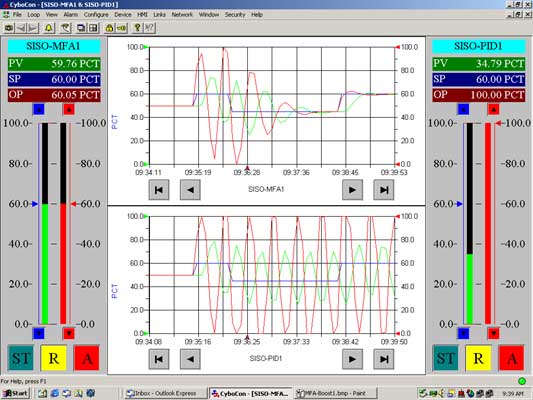
Comparison of MFA and PID
Starting from the same oscillating control condition,
the system will continue to oscillate under PID control,
while the MFA system will quickly adapt to an excellent
control condition. If both controllers start from a
sluggish situation, MFA will control the process faster
and better while PID will remain sluggish.
MFA Control System Requirements
As a feedback control system, MFA requires that the
process be (1) controllable, (2) open-loop stable, and
(3) either direct or reverse acting (process does not
change signs). If the process is not controllable, improvement
of the process structure or its variable pairing is
required. If the process is not open-loop stable, it
is always a good practice to stabilize it first. However,
for certain simple open-loop unstable processes such
as a non self-regulating level loop, no special treatment
is required when using MFA. If a process changes its
sign within its operating range, special MFA controllers
are required.
SISO MFA Configuration
A SISO MFA controller has only a few parameters to configure:
(1) Sample Interval, Ts - the interval between two samples
or calculations in seconds. A high speed MFA controller
can run at a 1 million second rate; (2) Controller Gain,
Kc - use of a default value is recommended, (3) Time
Constant, Tc - a rough estimate of the process Time
Constant in seconds; and (4) Acting Type - direct or
reverse acting of the process. If the process input
increases and then its output increases, it is direct
acting, and vice versa. However, MFA controllers embedded
in various platforms always use the vendor’s definition.
Sometimes, controller acting type is used, which is
different than the process acting type.
According to the principles in the information theory,
it is required that the Sample Interval be smaller than
or equal to one third of the Time Constant. That is,
Ts<=1/3Tc, where Ts is the Sample Interval, and Tc
is the Time Constant.
MFA does not require process identification and is not
a dynamic modeling based controller. Once the configuration
is done, MFA can be launched at any time, and it will
control the process immediately. MFA controllers can
be switched between automatic and manual at any time.
No specific bumpless transfer procedure is required.
|